

 ( Download )
( Download )
THE AERIAL BEAST / 無人飛行仿生獸
近年來數位設計製造應用於飛行系統,滿足了對於高度精準要求的航太產業。本次設計練習以數位設計製造的手挽,觀察、研究自然界飛行生物的結構、器官、能量供給、行為特色並了解其運作機制,進而打造透過以翅膀拍打之翼蹼運動機構,製作猶如自然界生物體般的飛行仿生獸。


經過材料測試後得知,因重量因素本次設計不能再使用壓克力作為機構材,第一代的飛行仿生獸尚未設計完成便重新改版。


對於飛行器而言,輕量化的機身結構是很重要的考量課題,對材料強度、韌性、經濟性、可得性進一步研究。

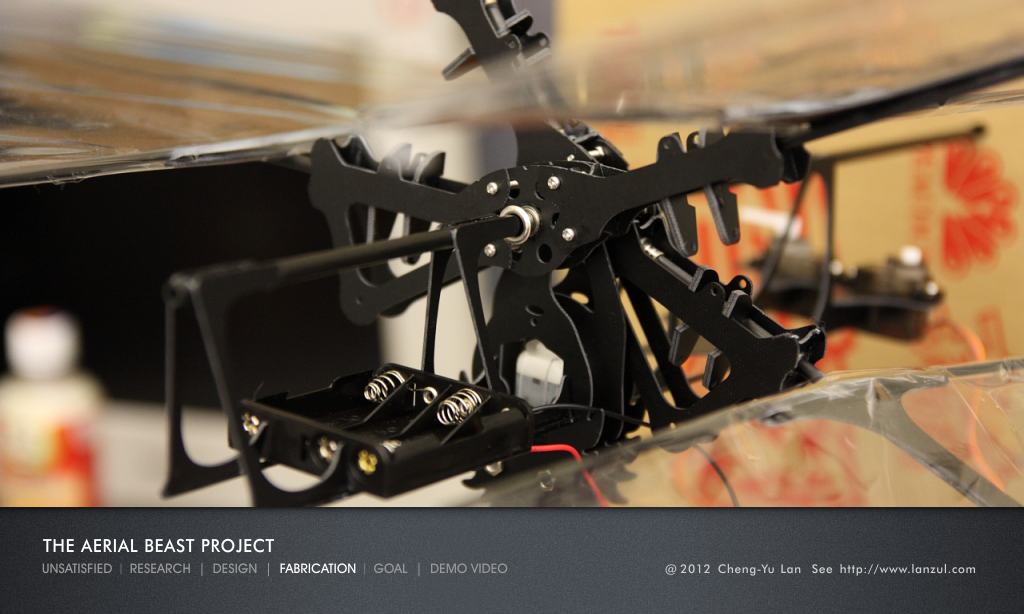
由碳纖維與玻璃纖維構成了第二代飛行仿生獸,翅膀設計是採飛機固定翼的設計方式,用水滴狀的玻璃纖維肋板增加結構強度,但是也大幅增加了玻璃纖維板的用量,造成機翼自重過重。



活動關節則是使用了萬向球頭連桿來做傳動,球頭可360度的自由活動,以最簡化的機構克服了動力面的力學問題。

微型滾珠培林



玻璃纖維板在切割加工上需要較高硬度的特殊CNC鎢鋼鑽頭,如使用一般木工或金屬CNC鑽頭切割玻璃纖維板,容易發生斷棒,且切口易起毛邊。最終找到了PC產業製做主機板的玉米芽紋鍍膜鎢鋼鑽頭可以滿足玻璃纖維板切割需要。


翅膀的薄膜最初是選用了PVC塑膠膜,但事後發現PVC材質特性上受壓會變形,當翅膀遇到風壓時,塑膠模的形變會對飛行造成氣流干擾產生阻力,再經一番尋找後,最終取得了輕盈無彈性的OPP透明塑膠包裝紙做為翅膀縮膜的用材。

第三代飛行獸大幅減量了玻璃纖維板的使用,進而增加碳纖維管的使用比重。傳動系統也由齒輪組簡化成慢速直流馬達直接帶動翅膀拍打。








機翼省去了厚重的結構肋板,改以細碳纖維管代替,製成類似蜻蜓翅膀的對秤扇片,成功減輕了機翼的重量。






飛行尾翼採三角設計,關節點以萬向球頭固定,透過Arduino控制兩具伺服馬達,連接兩支尾桿做線性位移動作,進而改變尾翼仰頃與左右擺動。




翅膀內側設有自旋裝置,給予仿生獸飛行時提供必要的向前推力與向上升力。當翅膀向下拍打時,翅膀會平放15度以提供機體升力,當翅膀向上抬起時翅膀又會後頃15度以提供向前的推力。


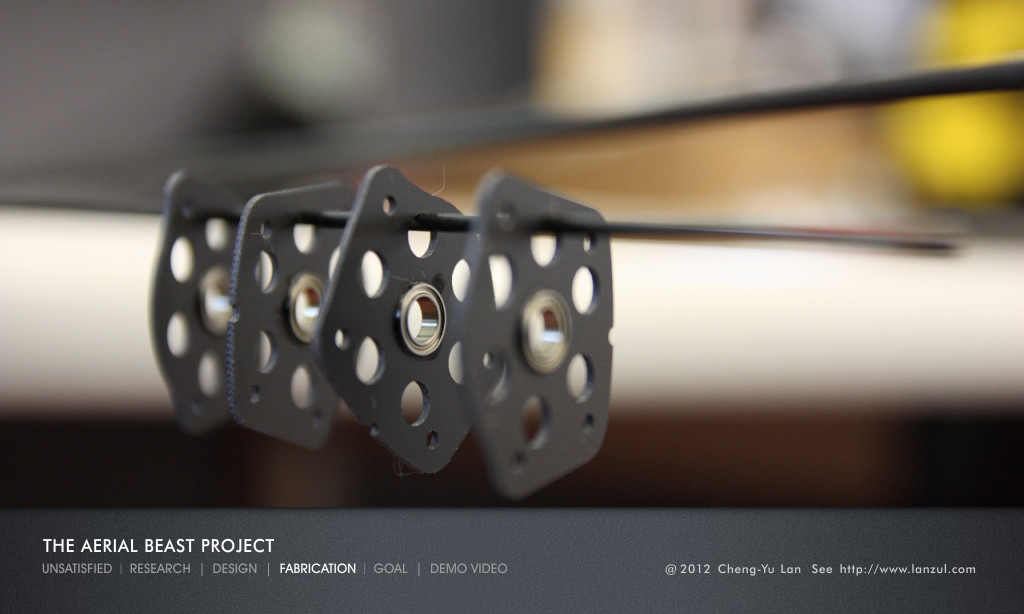
培林與玻纖板接合









0 Comments